2013/07/28
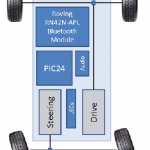
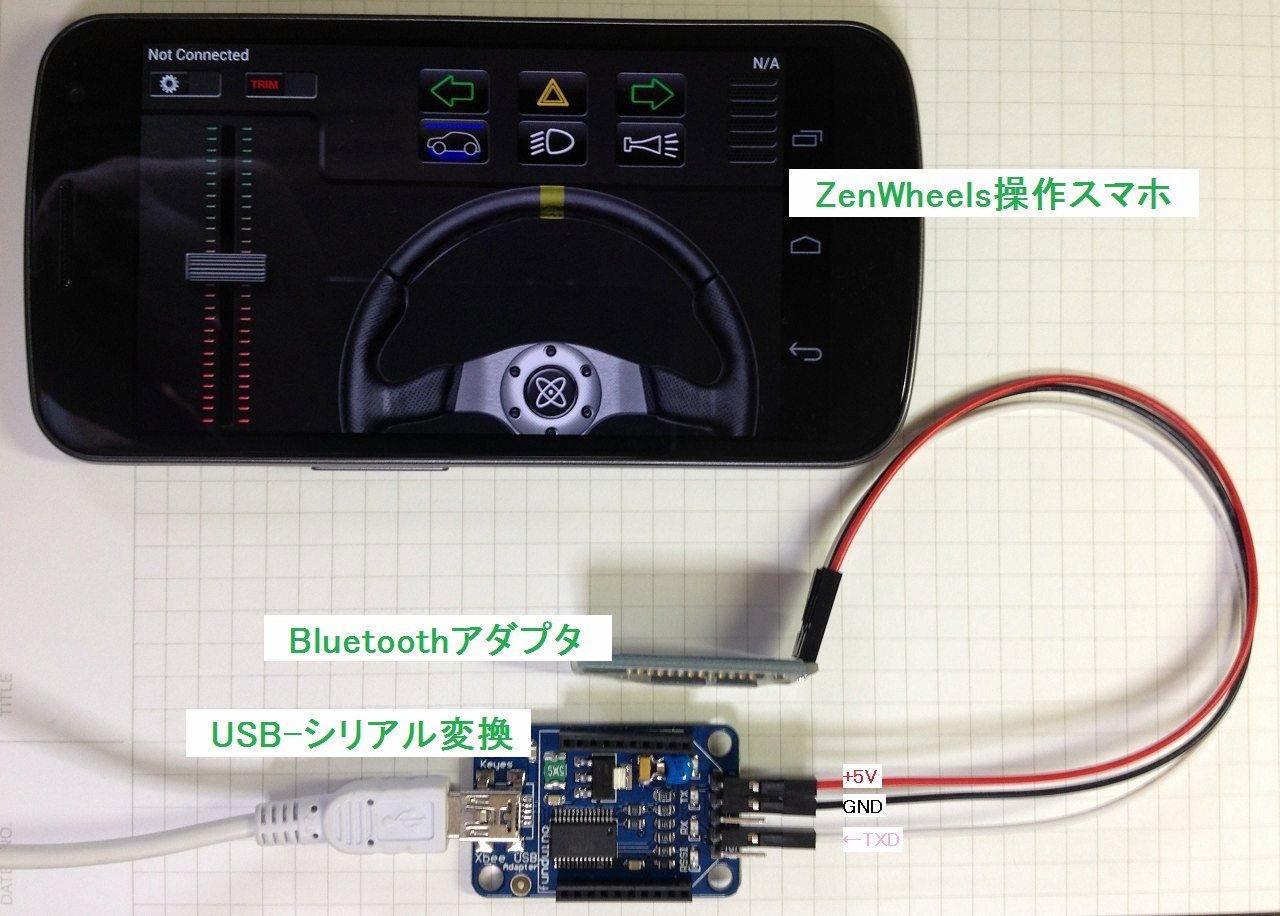
ZenWheelsからの制御データ
ZenWheelsからのデータをダンプしてみた。
(スマホよりも手軽な送信機を作るための情報収集)
リセット
C1 00 81 00 82 00
アクセル前進
82 00
82 01
82 02
..
82 3E
82 3F
アクセル後退
82 00
82 7F
82 7E
..
82 42
82 41
ハンドル右へ
81 00
81 01
81 02
..
81 3E
81 3F
ハンドル左へ
81 00
81 7F
81 7E
..
81 42
81 41
ルームライト
87 01
87 02
83 00 84 00 87 03
83 00 84 00 87 04
87 05
87 00
ヘッドライト
83 02 83 08 84 02 84 08
85 01
83 02 83 08 84 02 84 08
85 02
83 00 84 00
85 00
クラクション
86 01
86 00
右ウインカ
87 00
+繰り返し
+83 00 84 01 84 04
+83 00 84 00
左ウインカ
87 00
+繰り返し
+83 01 83 04 84 00
+83 00 84 00
ハザード
87 00
+繰り返し
+83 01 83 04 84 01 84 04
+83 00 84 00